Well, this morning I made a ton of progress on the RS-232 aspect. I replaced the chip I was using with a new one, and tried it using the STK500, and it worked great, both ways. I went to the usual haunts looking for code/hardware solutions, and found myself on AvrFreaks.net. I found a complete solution for the MAX232 setup, and it was identical to my other setup. I configured the AvrFreak code for my board, and gave it a whirl. Still no go. I switched to RS232-0 instead of RS232-1, and things started working. I got both boards working pretty well, although the topside board seems to reset a bunch for some reason.
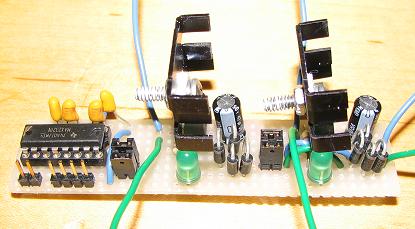
Have a look at the serial level-shifter, after it is mounted onto the proto board (the same one as the power circuits). I also mounted heat sinks onto the 7805 and 7812 (I even used thermal grease!).
{kind=link}
Tonight, I had some spare time, so I decided to crack open the Futaba joystick controller. The left forward/back joystick isn’t spring loaded, it has some frictionized type of setup to make it easier for keeping the plane flying level. I kept meaning to see what it would take to add a spring to that joystick.
Anyway, I carefully opened everything up, and what a mess. Nearly everything is hard-wired, and the wires are routed under parts that are firmly mounted to the board. There is no way to add springs to the joysticks without buying more parts. The connectors are stuck on to their mates pretty well too, and I have to resort to pliers to remove them. I can’t even imaging replacing the battery — I would imagine it would be easier to chuck the thing and just buy a new one when the battery dies. What a horrible design. At any rate, wires are wedged behind the power switch, and it has to be removed. The switch comes apart at the lowest level. I am able to swap the two joysticks, and I attempt re-assembling the power switch as carefully as possible, but once it is together the action doesn’t work very well (it doesn’t click to the on position), and the power meter doesn’t register. I give up before I chuck the thing into the creek.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}